6-akset industriel robotisk kollaborativ robotarm til emballage


6-akset industriel robotisk kollaborativ robotarm til emballage
Hovedkategori
AGV AMR / løfteanordning med løftefunktion AGV AMR / AGV automatisk guidet køretøj / AMR autonom mobil robot / AGV AMR bil til industriel materialehåndtering / Kina-producent AGV robot / lager AMR / AMR løfteanordning med løftefunktion laser SLAM navigation / AGV AMR mobil robot / AGV AMR chassis laser SLAM navigation / intelligent logistikrobot
Anvendelse

AMB-serien af ubemandede chassiser til autonome AGV-køretøjer er et universalchassis designet til autonome AGV-køretøjer og tilbyder funktioner såsom kortredigering og lokaliseringsnavigation. Dette ubemandede chassis til AGV-vogne tilbyder omfattende grænseflader såsom I/O og CAN til montering af forskellige øvre moduler sammen med kraftfuld klientsoftware og forsendelsessystemer, der hjælper brugerne med hurtigt at fuldføre fremstilling og anvendelse af autonome AGV-køretøjer. Der er fire monteringshuller øverst på AMB-serien af ubemandede chassiser til autonome AGV-køretøjer, som understøtter vilkårlig udvidelse med donkraft, ruller, manipulatorer, latent trækkraft, display osv. for at opnå flere anvendelser af ét chassis. AMB kan sammen med SEER Enterprise Enhanced Digitalization realisere samlet forsendelse og implementering af hundredvis af AMB-produkter på samme tid, hvilket i høj grad forbedrer det intelligente niveau af intern logistik og transport på fabrikken.
Funktion
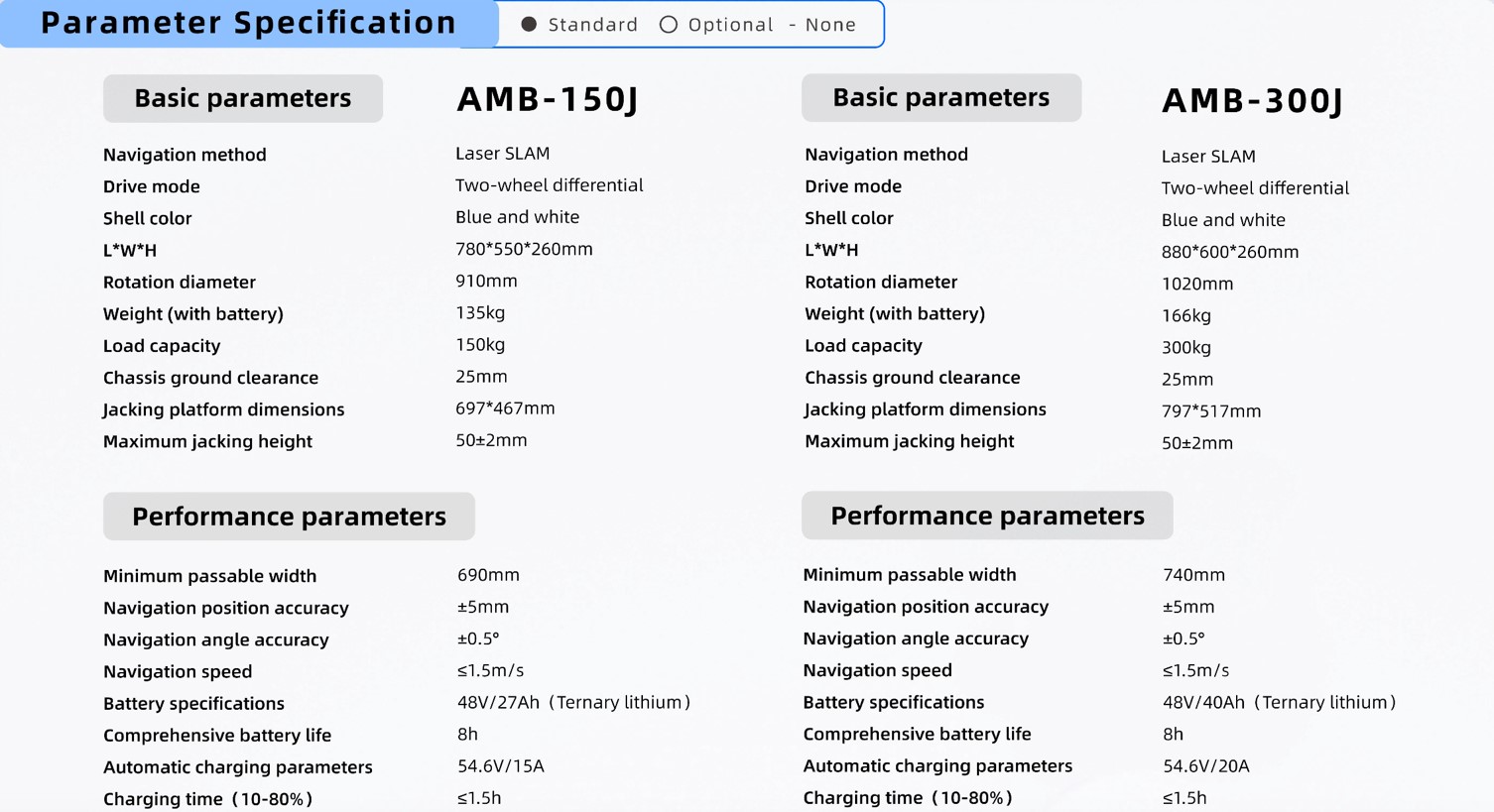
· Belastningsevne: 150 kg og 300 kg
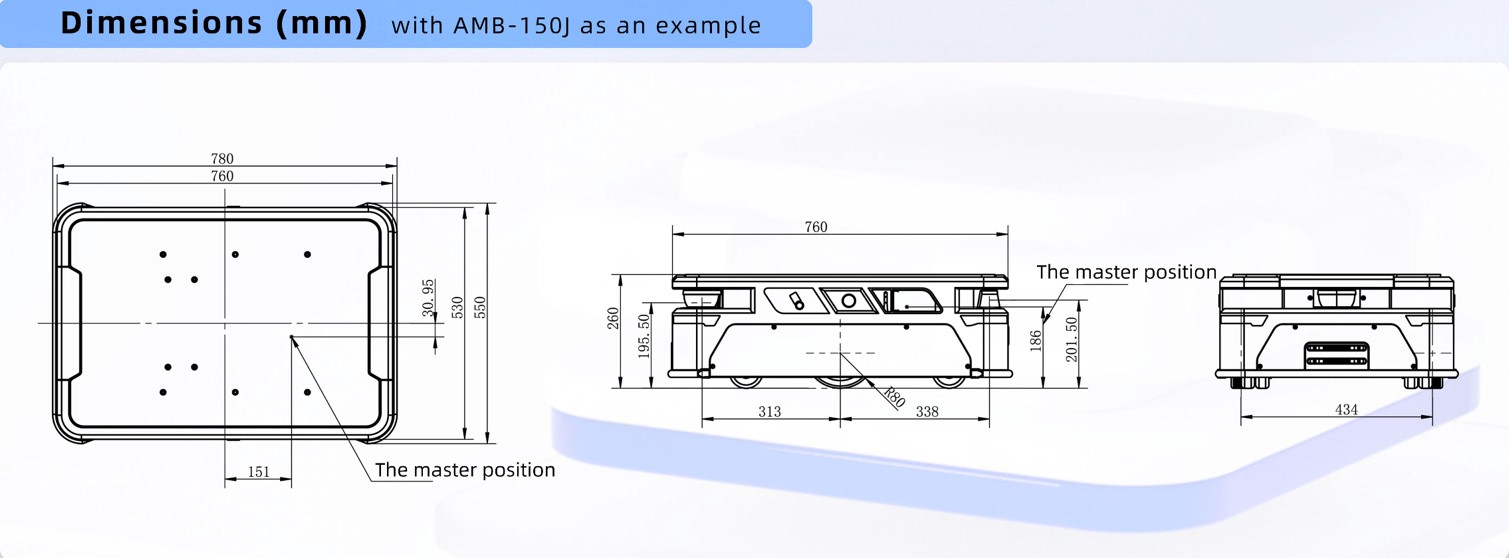
·maks. løftehøjde: 50 mm
· Navigationspositionsnøjagtighed: ±5 mm
·navigationsvinkelnøjagtighed: ±0,5°
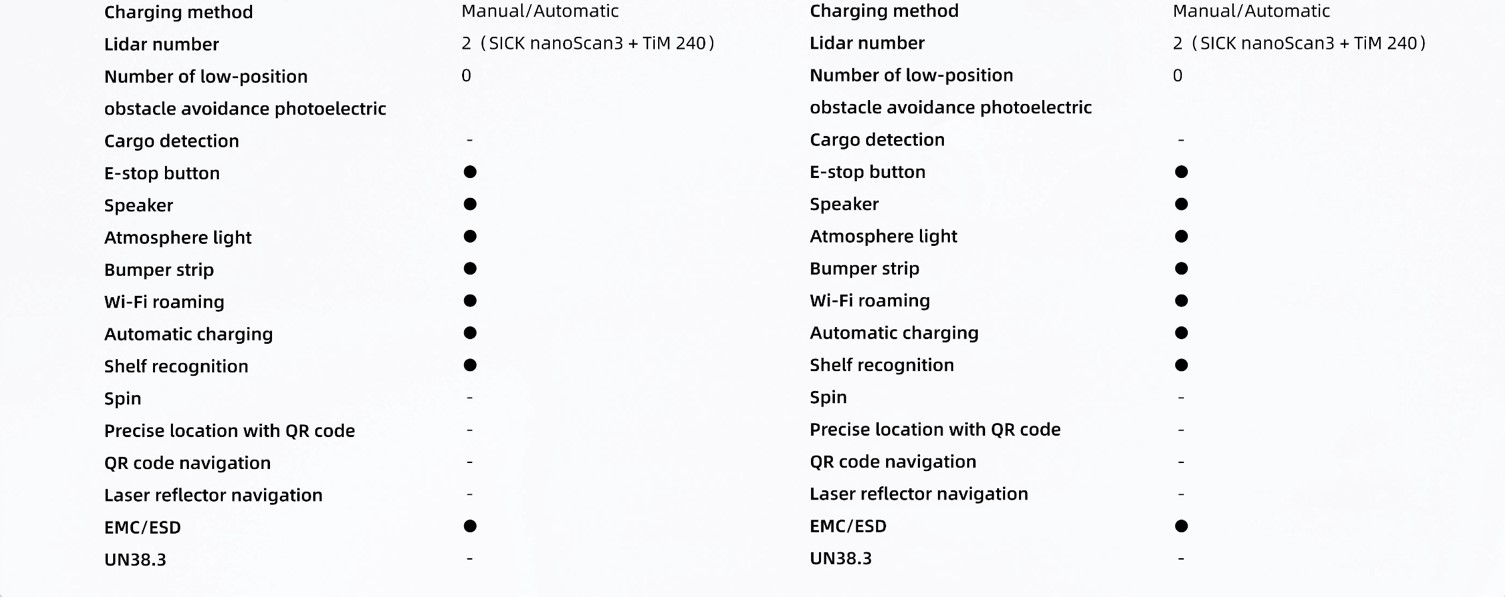
● Udvidede funktioner tilgængelige når som helst
Omfattende og fremragende standardfunktioner samt rige og praktiske avancerede funktioner hjælper kunderne med nemt at opnå intelligent logistik.
● Platforme med flere specifikationer tilgængelige for udvidelse
Leverer platforme på 150 kg og 300 kg for at opfylde belastnings- og scenekravene i forskellige brancher. Den kan også bruges med manipulatorer, ruller, donkrafte, latent trækkraft, panorering/tilt, displayskærm osv. for at opnå flere applikationer med ét chassis.
● ±5 mm, effektiv og præcis
Laser SLAM-algoritmen bruges til at opnå højpræcisionslokalisering med en ikke-reflekterende gentagen lokaliseringsnøjagtighed på ±5 mm, hvilket muliggør problemfri docking mellem mobile robotter og mennesker samt effektiv strøm af last mellem forskellige punkter. Bemærk: De faktiske værdier afhænger af miljøforholdene.
● Stabil navigation for sikkerhed og pålidelighed
Laser SLAM-navigation, laserreflektornavigation, QR-kodenavigation og andre navigationsmetoder er perfekt integreret og problemfrit koblet til for at sikre den mobile robots stabile arbejde.
● Nem implementering og synlig administration
En komplet række understøttende software og digitale systemer kan nemt realisere drift, planlægning og informationsstyring af mobile robotter og problemfrit forbindes med fabrikkens MES-system for virkelig at realisere smart logistik.
Relaterede produkter



Specifikationsparameter
Vores forretning


Produktkategorier
-

Lh1850-B-6 6-akset svejsemaskine automatisk in...
-

1000 kg Smart Laser Navigation Elektrisk Automatisk ...
-

6-akset robotarm industriel robotarm robotarm...
-
Automatisk industriel robotsvejsemaskine Ar...
-

6-akset industrirobotarm Szgh-I5 samarbejdsrobot...
-
Lavprismontering, palletering, polering, sprøjtning...