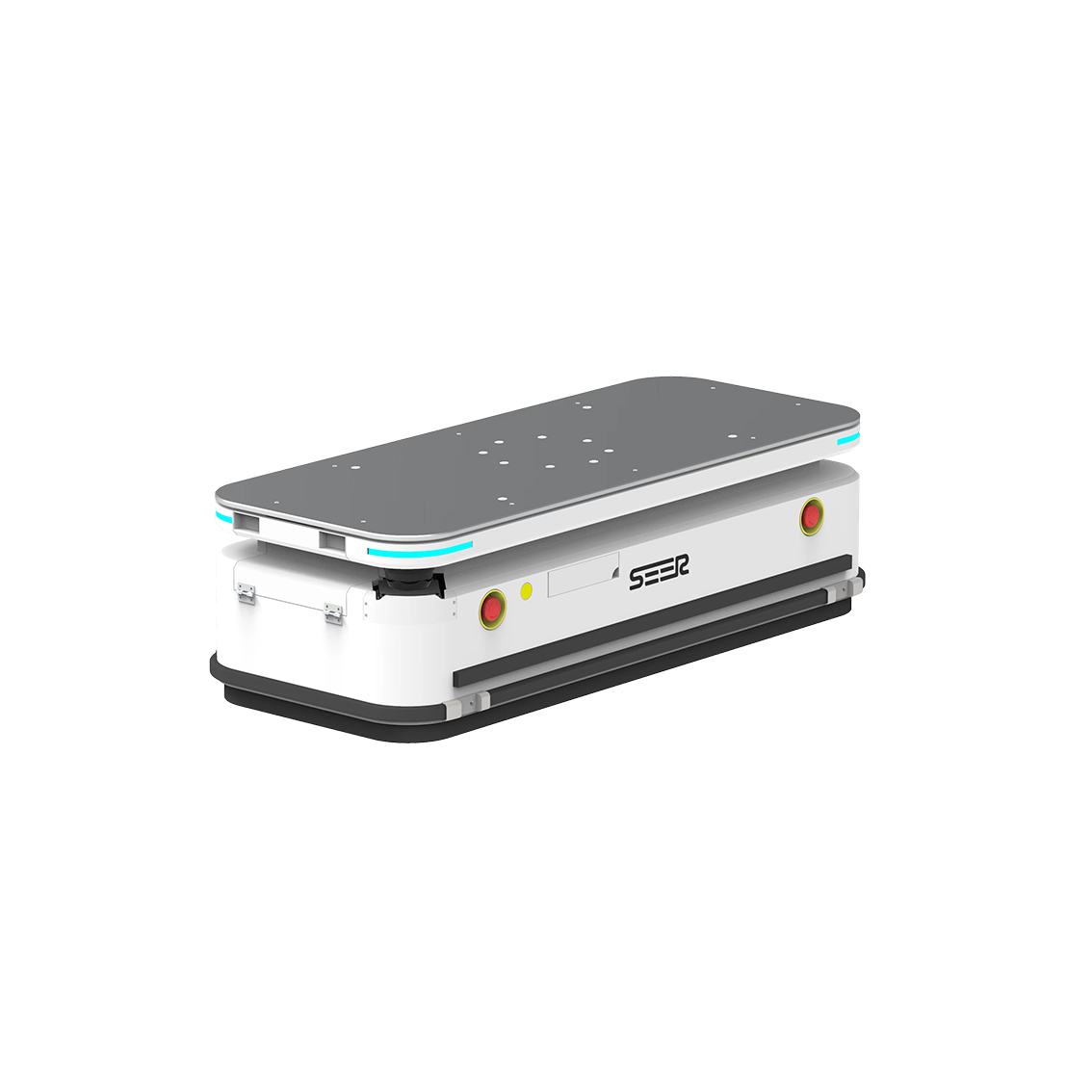
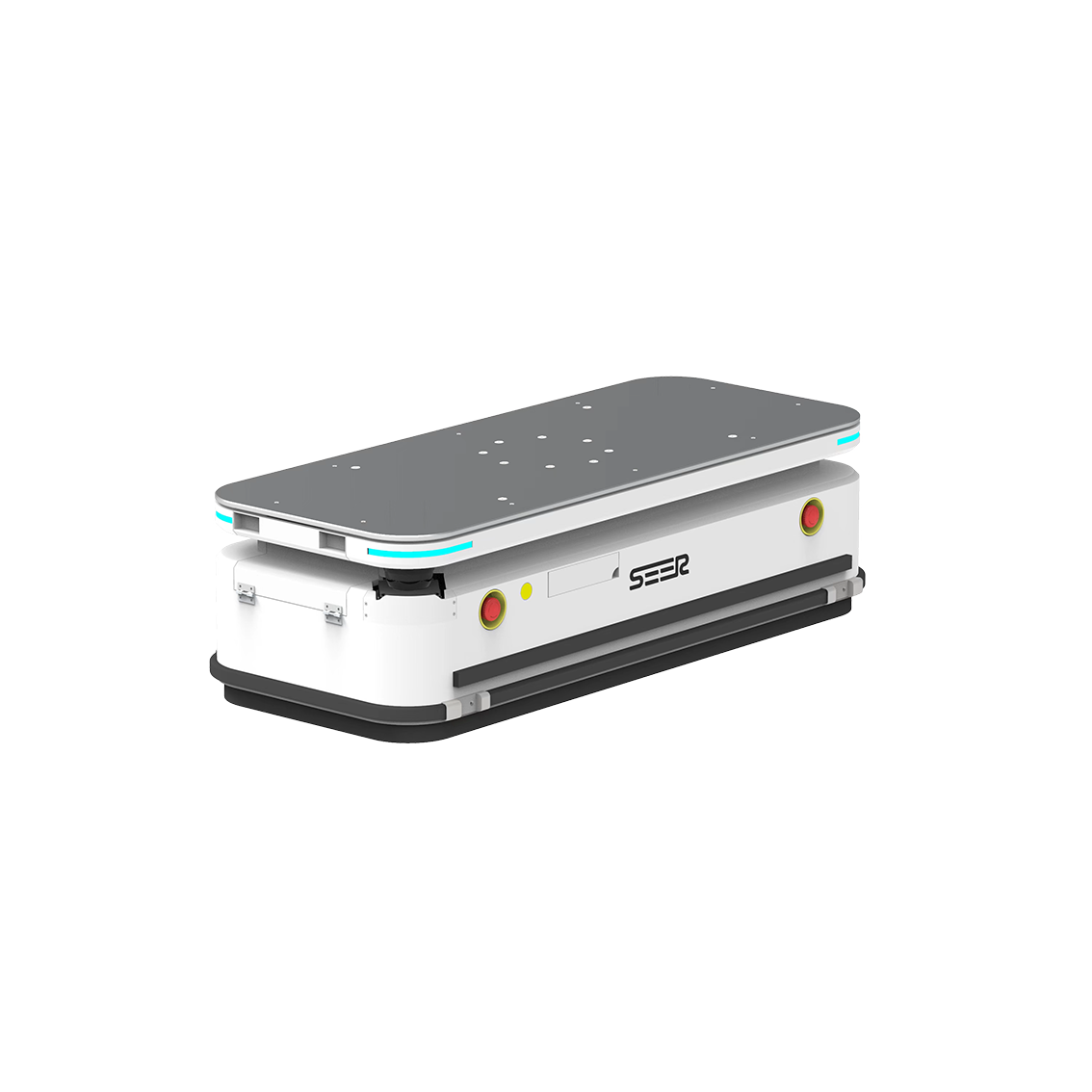
DÆKROBOTER – Omnidirektionel løfterobot SJV-W600DS-DL
Hovedkategori
AGV AMR / løfteanordning med løftefunktion AGV AMR / AGV automatisk guidet køretøj / AMR autonom mobil robot / AGV AMR bil til industriel materialehåndtering / Kina-producent AGV robot / lager AMR / AMR løfteanordning med løftefunktion laser SLAM navigation / AGV AMR mobil robot / AGV AMR chassis laser SLAM navigation / intelligent logistikrobot
Anvendelse

AMB-serien af ubemandede chassiser til autonome AGV-køretøjer er et universalchassis designet til autonome AGV-køretøjer og tilbyder funktioner såsom kortredigering og lokaliseringsnavigation. Dette ubemandede chassis til AGV-vogne tilbyder omfattende grænseflader såsom I/O og CAN til montering af forskellige øvre moduler sammen med kraftfuld klientsoftware og forsendelsessystemer, der hjælper brugerne med hurtigt at fuldføre fremstilling og anvendelse af autonome AGV-køretøjer. Der er fire monteringshuller øverst på AMB-serien af ubemandede chassiser til autonome AGV-køretøjer, som understøtter vilkårlig udvidelse med donkraft, ruller, manipulatorer, latent trækkraft, display osv. for at opnå flere anvendelser af ét chassis. AMB kan sammen med SEER Enterprise Enhanced Digitalization realisere samlet forsendelse og implementering af hundredvis af AMB-produkter på samme tid, hvilket i høj grad forbedrer det intelligente niveau af intern logistik og transport på fabrikken.
Funktion
· Nominel belastning: 600 kg
· Køretid: 6,5 timer
· Lidar-nummer: 2
· Rotationsdiameter: 1322 mm
· Navigationshastighed: ≤1,2 m/s
· Positioneringsnøjagtighed: ±5, ±0,5 mm
● Flere navigationsmuligheder tilgængelige
Laser SLAM og QR-kode navigation kan frit og nemt aktiveres, hvilket opfylder kravene til flere scenarier og forskellig nøjagtighed.
● Mere fleksibel omnidirektionel bevægelse
Den omnidirektionelle bevægelsesmodel muliggør ubegrænset bevægelse og færre begrænsninger i scenarierne.
● Sikkerhedsbeskyttelse
Allround-beskyttelse via LIDAR + Safe Edge.
● Effektiv og intelligent
Planlægnings- og lagersystemerne er problemfrit tilgængelige for dybdegående forretningsstyring og optimering.
Et slankt design på 546 mm til forskellige smalle gange.
● Høj lasteevne og lang batterilevetid
Højtydende lastekapacitet understøtter en belastning på 600 kg og 6,5 timers batterilevetid.



Specifikationsparameter
| Produktnavn | SJV-SW500 | SJV-W600DS-DL | SJV-W1000 | SJV-W1500 | |
| Grundlæggendeparametre | Navigationsmetode | Laser SLAM | Laser SLAM | Laser SLAM | Laser SLAM |
| Køretilstand | Tohjulet differentiale | Dobbelt rat i alle retninger | Tohjulet differentiale | Tohjulet differentiale | |
| Skalfarve | Blå/tilpasset farve | RAL9003 / Tilpasset farve | Blå / Tilpasset farve | Blå / Tilpasset farve | |
| L*B*H (mm) | 924*758*300 | 1276*546*365 | 1224*730*420 | 1210*892*280 | |
| Rotationsdiameter (mm) | 1035 | 1330 | 1350 | 1415 | |
| Vægt (med batteri) (kg) | 200 | 320 | 250 | 250 | |
| Belastningsevne (kg) | 500 | 600 | 1000 | 1500 | |
| Donkraftplatformens dimensioner (mm) | Ø600 | 1250*510 | 1200*700 | 1180*860 | |
| Maksimal løftehøjde (mm) | 60±1 | 60±1 | 60±1 | 60±1 | |
| Præstation parametre | Minimumspasserbar bredde (mm) | 898 | 660 | 870 | 1000 |
| Navigationspositionsnøjagtighed (mm) * | ±5 | ±5 | ±5 | ±5 | |
| Navigationsvinkelnøjagtighed (°)* | ±0,5 | ±0,5 | ±0,5 | ±1 | |
| Navigationshastighed (m/s) | ≤1,67 | ≤1,2 | ≤1,67 | ≤1,67 | |
| Batteriparametre | Batterispecifikationer (V/Ah) | 48/40 (lithiumjernfosfat) | 48/40 (lithiumjernfosfat) | 48/40 (lithiumjernfosfat) | 48/40 (lithiumjernfosfat) |
| Omfattende batterilevetid (t) | 10 | 8 | 6 | 6 | |
| Automatiske opladningsparametre (V/A) | 54,6/25 | 54,6/25 | 54,6/25 | 54,6/25 | |
| Opladningstid (10-80%) (t) | ≤1,5 | ≤1,5 | ≤1,5 | ≤2 | |
| Opladningsmetode | Manuel/Automatisk | Manuel/Automatisk/Switch | Manuel/Automatisk | Manuel/Automatisk | |
| Konfigurationer | Lidar-nummer | 1(SICK nanoScan3/P+F R2000-HD) | 2 (SICK nanoScan3) | 2(SICK nanoScan3 / P+FR2000-HD + OLEILR-1BS2) | 1 (SICK nanoScan3 / P+F R2000-HD) |
| Antal lavt positionerede fotoelektriske forhindringsundgåelsespunkter | - | - | - | - | |
| Lastdetektion | - | - | - | - | |
| Nødstopknap | ● | ● | ● | ● | |
| Højttaler | ● | ● | ● | ● | |
| Atmosfærelys | ● | ● | ● | ● | |
| Bumperstribe | ● | ● | ● | ● | |
| Funktioner | Wi-Fi-roaming | ● | ● | ● | ● |
| Automatisk opladning | ● | ● | ● | ● | |
| Hyldegenkendelse | ● | ● | ● | ● | |
| Spin | ● | - | - | ● | |
| Præcis placering med QR-kode | 〇 | 〇 | 〇 | 〇 | |
| QR-kode navigation | 〇 | 〇 | 〇 | 〇 | |
| Laserreflektor navigation | 〇 | 〇 | 〇 | 〇 | |
| Certificeringer | EMC/ESD | ● | ● | ● | - |
| UN38.3 | ● | ● | ● | 〇 | |
* Navigationsnøjagtighed refererer normalt til den repeterbarhedsnøjagtighed, som en robot navigerer til stationen med.
● Standard 〇 Valgfri Ingen
Vores forretning







